Publication trimestrielle du Laboratoire
d'analyse et d'architecture des systèmes du CNRS

© Frédéric Lerasle/LAAS-CNRS
Le bâtiment Adream sera un lieu de recherche pour concevoir, développer et évaluer des méthodes innovantes de perception par un réseau de capteurs intégrés dans l’environnement.
Au delà des applications de vidéo-surveillance pour la sécurisation de sites sensibles, ces méthodes répondent aussi à des besoins socio-économiques importants concernant la surveillance de personnes fragiles à domicile (détection de chutes, analyse des activités), la sécurité civile (intervention dans des lieux instrumentés), la production industrielle (prévention des accidents, travail collaboratif Homme-Robot) ou la surveillance des systèmes de transport (prévention des dangers, gestion du trafic). Par ailleurs un réseau de capteurs dans un lieu public (centre commercial, hôpital) peut être exploité pour le déploiement de services interactifs sur les appareils portés par l’Homme (smart phones...): aide à la navigation, localisation, diffusion d’informations situées…
Les méthodes que nous allons développer dans le bâtiment Adream, traitent de plusieurs défis scientifiques posés par ces applications. L’objectif de ces travaux consiste à connaître à tout instant, l’état d’un lieu « intelligent », principalement les positions et les activités de tous les agents qui l’occupent. Nous continuerons nos travaux sur la détection, le suivi, et l’identification de personnes ou d’objets mobiles (véhicules, robots) depuis des données acquises sur un réseau de capteurs. Un défi sera de tirer parti de la perception multi-caméras multi-modalités pour améliorer les techniques actuelles: caméras dans diverses longueurs d’onde, lecteurs RFID, caméras site/azimut/zoom, caméras 3D telles que la Kinect... La reconnaissance des postures de l’homme, mais aussi l’identification des objets qu’il manipule, permettent ensuite de reconnaître les gestes, les actions, les activités de chaque Homme, puis d’analyser des situations d’interaction. Vis-à-vis des techniques actuelles, généralement centralisées, nous proposerons des méthodes d’estimation décentralisée avec des observations incomplètes (couverture incomplète par des caméras à champs disjoints) et acquises de manière asynchrone.
D’autres défis concernent l’intégration de chaque capteur, en traitant de l’adéquation entre algorithmes et architecture, pour satisfaire des contraintes sévères de performances temps réel, de robustesse, de compacité et d’économie énergétique. Le déploiement même d’un tel réseau pose de nombreux problèmes: comment calibrer ces capteurs? Comment adapter le réseau en fonction du contexte, ajouter ou supprimer des capteurs de manière transparente? Comment garantir une couverture optimale d’un système de surveillance (problème classique du gardien de musée)? Comment interagir avec les Hommes (opérateurs, mais aussi, usagers du lieu) ?
Le thème Robotique du LAAS mène déjà des recherches sur l’interaction de capteurs fixes avec des capteurs embarqués sur des robots mobiles. Une démonstration existante illustre la navigation coordonnée entre un homme et notre robot Rackham, en exploitant plusieurs modalités sensorielles : caméra, télémétrie laser et lecteurs RFID associés à des antennes directionnelles pour détecter un badge porté par l’homme. Le robot reçoit aussi la position des personnes détectées par deux caméras enfouies dans l’environnement. Ces informations sont fusionnées dans une carte du sol, exploitée par le robot pour s’asservir sur les mouvements de l’homme, tout en évitant les obstacles.
© Frédéric Lerasle/LAAS-CNRS
Au delà du lien avec la Robotique, cette thématique peut bénéficier de nombreuses synergies avec les autres domaines traités dans l’axe thématique ADREAM:réseau et communication (adaptation des protocoles de communication pour garantir la qualité de service), intégration (architecture des systèmes embarqués pour la perception, méthodologie de conception,co-design…), protection de la vie privée, diagnostic….
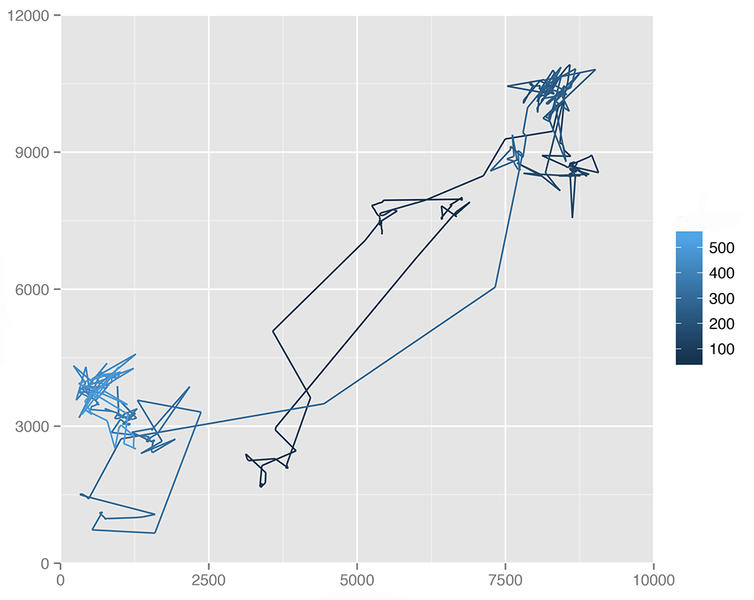
Ces thématiques ont été déjà traitées dans plusieurs projets collaboratifs pour différents contextes applicatifs. Le projet ANR FIL (Information Fusion for Localization) visait à suivre précisément les trajets en intérieur de personnes équipées d’un PDA en faisant collaborer un ensemble de capteurs communicants sans fil, et en combinant deux technologies, la télémétrie ultrasons et l’échange de signaux RF 802.15.4. Dans le projet FP6 CommRob nous avons traité de la navigation coordonnée homme-robot dans un lieu public. Plusieurs projets (ANR HomeCare, ANR ASSIST, ANR RIDDLE) traitent de la surveillance et de l’assistance à domicile de personnes agées ou handicapées.