
Logiciels, Prototypes et Démonstrateurs
SOFTWARE
- SATAW-Tool - Matlab Toolbox for analysis and controller design in presence of saturation elements in the control loop. LMI based functionalities are provided, where sector conditions are used for the saturation modeling. It is entirely written in Matlab and uses YALMIP for parsing LMIs, the optimization problems being solved using any SDP free solvers supported by YALMIP ou using LMILAB (not recommended for relatively high dimension problems). Can be freely downloaded and used. Developed by Isabelle Queinnec and Sophie Tarbouriech
- R-RoMulOC - Randomized and robust multi-objective control toolbox for Matlab. Modeling and robustness analysis based on LMI techniques. Works with parser YALMIP, all control problems are solved by SDP solvers such as SeDuMi, CSDP, DSDP, SDPT3... Can be freely downloaded and used. Main developer: Dimitri Peaucelle.
- HIFOO - A Matlab package for fixed-order controller design and H-infinity optimization, using a hybrid algorithm for nonsmooth, nonconvex optimization based on quasi-Newton updating, bundling and gradient sampling. Can be freely downloaded and used. Main developer: Michael L. Overton (Courant Institute, NY).
HELICOPTER BENCHMARK
The Helicopter setup consists of a base on which a long arm is mounted. The arm carries the helicopter body on one end and a counterweight on the other end. The arm can tilt on an elevation axis as well as swivel on a vertical (travel) axis. Quadrature optical encoders mounted on these axes measure the elevation and travel of the arm. The helicopter body, which is mounted at the end of the arm, is free to pitch about the pitch axis. The pitch angle is measured via a third encoder. Two motors with propellers mounted on the helicopter body can generate a force proportional to the voltage applied to them. The force, generated by the propellers, causes the helicopter body to lift off the ground and/or to rotate about the pitch axis. All electrical signals to and from the arm are transmitted via a slipping with eight contacts. The system is also equipped with a motorized lead screw that can drive a mass along the main arm in order to impose known controllable disturbances (the so-called Active Disturbance Option, ADO).
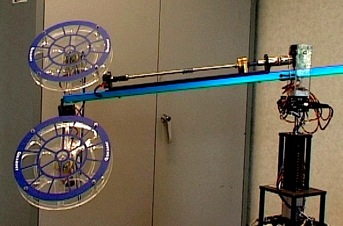
This Helicopter is a Quanser product.
Infos de contact
- Adresse : 7, avenue du Colonel Roche BP 54200 31031 Toulouse cedex 4, France
- GPS Lat : 43.564330 | Long : 1.476839
- Tél : +33 (0) 5 61 33 62 00
- Courriel