
Robotique et InteractionS - RIS
Responsable : Simon LACROIX Représentant des doctorants : Emile SIBOULET<

L'équipe "Robotique et InteractionS" (RIS) développe un projet de recherche portant essentiellement sur les machines autonomes intégrant des capacités de perception, de raisonnement, d'apprentissage, d'action et de réaction. Le défi porte sur leurs capacités à agir rationnellement dans des environnements dynamiques pour accomplir une grande diversité de tâches.
Mais si la robotique est une, les interactions qu'elle induit sont multiples et nous intéressent. Elles constituent en effet un champ de recherche sur lequel on identifie aujourd'hui de nombreux défis essentiels à l'avènement de ces machines. Il y a:
- tout d'abord les interactions constitutives de la notion même de robot : les interactions avec son environnement
- les interactions entre les différentes composantes d'un robot dans une architecture de contrôle cohérente intégrant des processus fonctionnels et cognitifs
- les interactions au sein de systèmes multi-robots hétérogènes
- les interactions du robot avec l'homme, qu'il soit distant ou présent physiquement dans l'environnement du robot
- les interactions avec les systèmes d'information existants, et plus généralement celles qui relèvent de l'intelligence ambiante
- enfin les interactions avec d'autres domaines et que l'on peut étudier en utilisant les outils issus de la robotique et en premier lieu les interactions moléculaires
Les recherches de RIS sont menées selon deux perspectibes complémentaires :
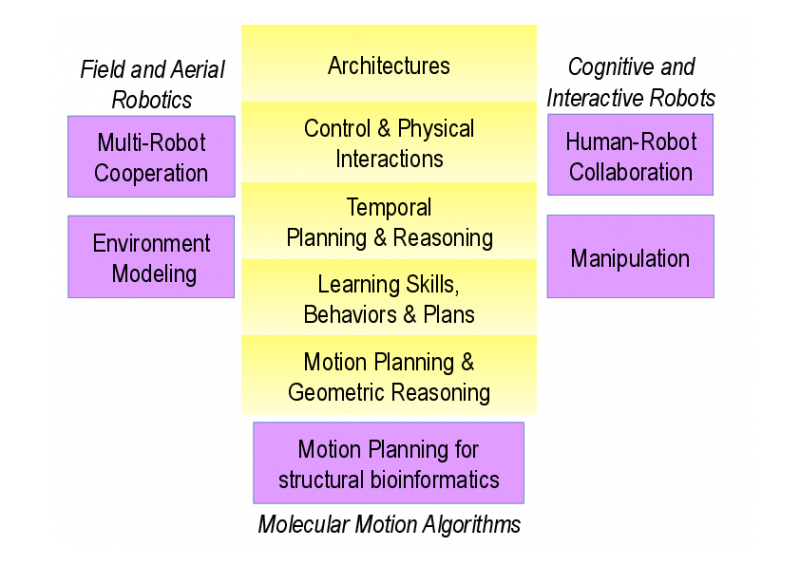
- Une perspective fondamentale, dans laquelle nous développons des modèles et algorithmes pour les problèmes décisionnels : planification de tâches symboliques, apprentissage, planification de mouvement et de manipulation pour des systèmes complexes
- Une perspective contextuelle, déclinée suivant les trois sujets suivants :
- Systèmes multi-robots
- Robot cognitif
- Problèmes de mouvement moléculaire
Infos de contact
- Adresse : 7, avenue du Colonel Roche BP 54200 31031 Toulouse cedex 4, France
- GPS Lat : 43.564330 | Long : 1.476839
- Tél : +33 (0) 5 61 33 62 00
- Courriel