
Robotics and InteractionS - RIS
Head: Simon LACROIX PhD student representative: Emile SIBOULET
A new version of the RIS site will be available in March

The "Robotics and InteractionS" team develops a research project on autonomous mobile machines that integrate perception, reasoning, learning, action and reaction capabilities. The challenge is on their capacity to act rationally in dynamic environments to achieve a large variety of tasks.
Our approach proceeds from the need to consider the robot as a whole regardless of frontiers between disciplines. The interactions induced by robots are varied, and constitute our main interests:
- the interactions that grounds any autonomous robot: the interactions with the environment
- the interactions between the various component of a robot, integrated within a control architecture that gathers functional and cognitive processes
- the interactions within teams of cooperating robots
- the interactions with humans, be they remote or physically present in the robot environement
- the interactions with existing information systems, and more generally in intelligent environments
- finally the interactions with other disciplines that can be studied using robotics methods, and in particular molecular interactions
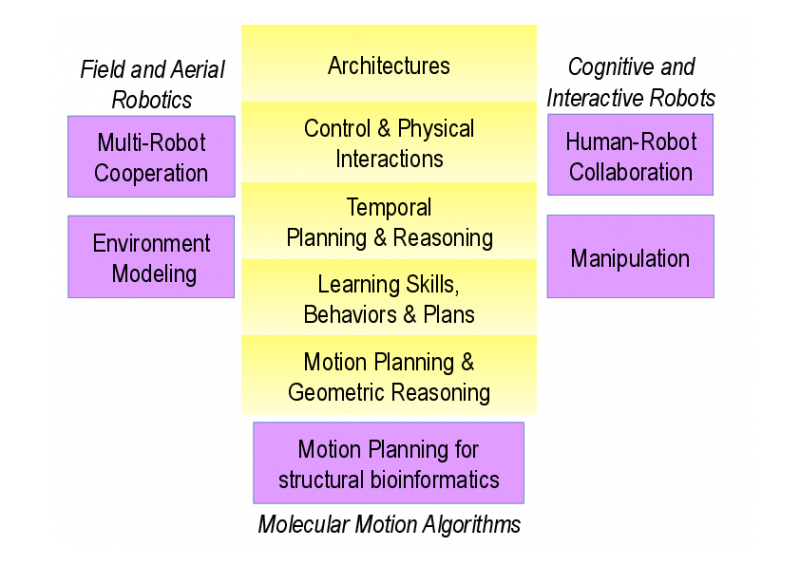
RIS research activities are conducted along two complementary perspectives:
- A fundamental perspective where we develop models and algorithms for decisional problems. This concerns control architectures, task planning, learning, and geometric motion and manipulation planning for highly complex systems.
- A contextual perspective where we investigate three concrete subjects:
- Cooperative multi-robot systems
- The cognitive and interactive robot
- Molecular motion problems
Contact
- Address: 7, avenue du Colonel Roche BP 54200 31031 Toulouse cedex 4, France
- GPS: Lat: 43.564330 | Long: 1.476839
- Phone: +33 (0) 5 61 33 62 00