
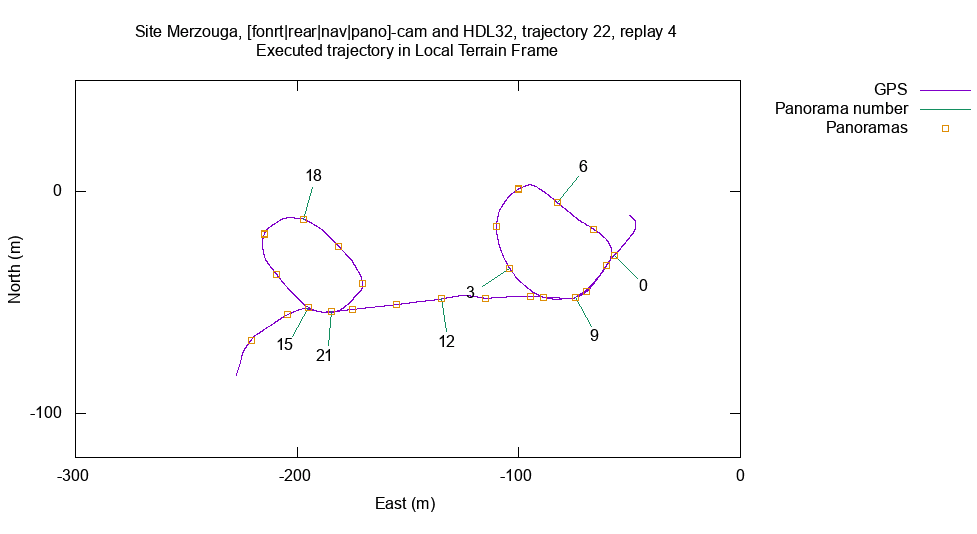
Minnie in Merzouga, trajectory 22, replay 4
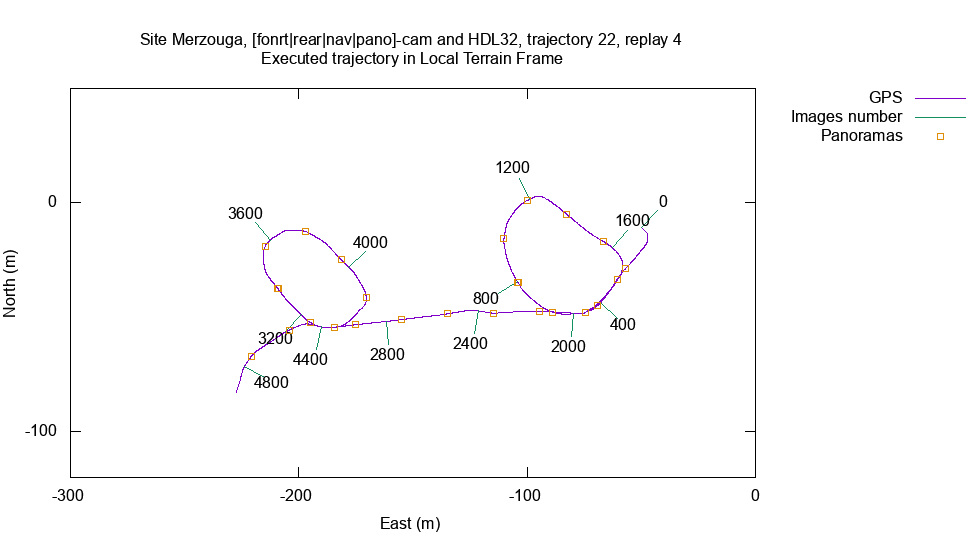
The trajectory is a partial execution of about two thirds of trajectory 22, with a stop every 20 meters to acquire a panorama (5 stereo pairs acquired with the nav_cam). Between panoramas, the robot speed is 0.3 m/s, and images are acquired at 4 Hz. While acquiring the panoramas, the front_cam and rear_cam do not gather any data (contrary to the Velodyne HDL32 lidar, which keeps gathering scans). Unfortunately, after each panorama, the image exposure of the front_cam and rear_cam becomes only acceptable after 25 acquisitions.
Velodyne HDL32 scans have been continuously acquired at 2 Hz, even when the robot was stopped to acquire panoramas.
About 20 corrupted image pairs and 35 lidar scans have been discarded from this dataset.
Downloads: