
The robots
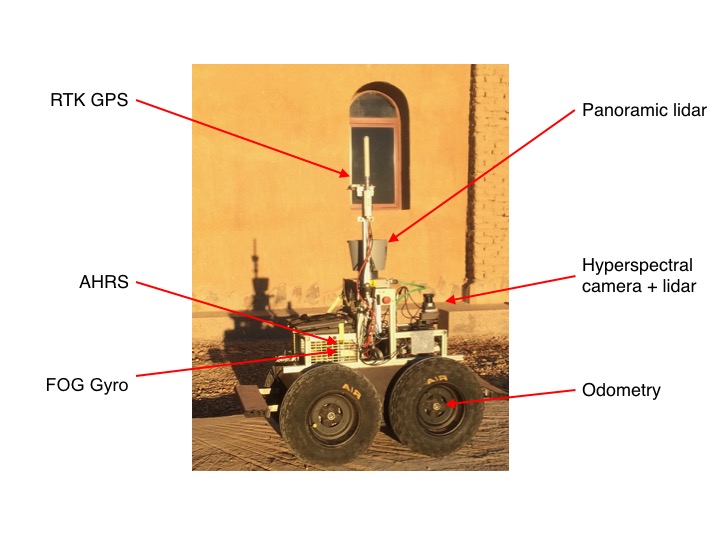
The rover Mana is a Segway RMP400 platform, equipped with the following series of sensors:
- An Xsens MTi-100 IMU, used as an AHRS to recover the robot pitch and roll angles
- A KVH DSP-3000 Fiber Optic Gyro, used to track the robot heading
- A Novatel OEM5 RTK GNSS to track the rover position
The sole exteroceptive sensor Mana is equipped with is a Velodyne HDL-64 Lidar that spins at 5 Hz (TODO) (a linescan Ximea hyperspectral camera, mounted with a Hokuyo UTM-30LX-EW lidar was only used once to gather a series of hypspectral datacubes)
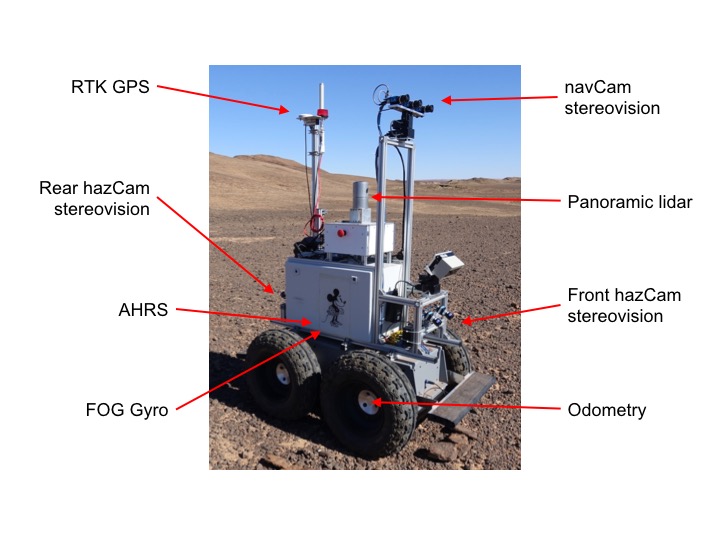
The rover Minnie is a Segway RMP440 platform, equipped with the same set of proprioceptive sensors than Mana:
- An Xsens MTi-100 IMU, used as an AHRS to recover the robot pitch and roll angles
- A KVH DSP-3000 Fiber Optic Gyro, used to track the robot heading
- A Novatel OEM5 RTK GNSS to track the rover position
Minnie is equipped with a richer suite of exteroceptive sensors:
- A Velodyne HDL-32 Lidar that spins at 10 Hz
- An orientable stereoscopic bench made of two 1920x1200 monochrome cameras, 27 cm baseline, with a field of view HxV = 88x60°
- Two fixed large field of view stereoscopic benches (1280x960 monochrome cameras, 14.5 cm baseline, 110x96°)

The third robot used to gather the datasets is a commercial SenseFly eBee UAV owned by the robotics department of ESA Automation and Robotics group. It is used to gather low altitude high resolution aerial images, on the basis of which the Pix4D software produces a high resolution digital surface map.
Ground truths
TODO: depict the characteristics of the terrain and robot poses ground truth. Mention how odometry is computed, the graph of frames...
Data acquisition process
TODO: depict the way data have acquired, the associated pros and cons
Calibration
TODO: upload all the data used to calibrate the stereoscopic benches
Datasheets
TODO: upload all the datasheets of the devices used